DLLとはダイナミックリンクライブラリの略で,プログラムの任意のタイミングでリンクすることができるライブラリです.通常,ライブラリは,コンパイルしたオブジェクトをリンクする際にプログラム本体に埋め込むのが普通です(これを静的リンクという)が,DLLは必ずしもコンパイル時にリンクする必要はなく,プログラムの実行時にリンクして利用することが可能です.
Continue reading
Tag Archives: RT-middleware
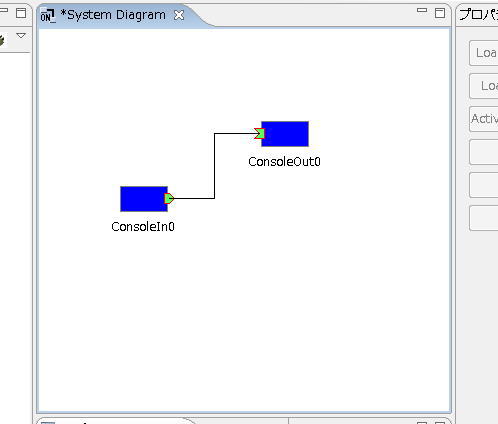
データポートによる通信 (push型)
入力コンポーネントと出力コンポーネントの通信(push型)
ここでは出力ポートを持つコンポーネントと,入力ポートを持つコンポーネントの通信を行ってみます.
コンフィグ機能の追加
コンフィグ機能とは,実行中のRTコンポーネントに数値などのパラメータを設定し,コンポーネントの動作を調整するための機能です.
たとえばモータ制御をするRTCの場合は,比例ゲインなどの制御パラメータを,また画像処理のRTCならば2値化するときの閾値などをコンフィグレーションにすると便利です.
RTコンポーネントに数値を設定する場合は,コンフィグだけでなく,データポートを使うこともできますが,コンフィグ機能はデータポートよりももっと低い頻度でのデータのやり取りを前提としており,またrtc.confなどの設定ファイルからのインポート機能も持っています.
Continue reading
初めてのRTコンポーネント作成
これからRTコンポーネントの作成方法について解説します。自分のロボットを作ためには、RTコンポーネント作成しなくてはなりません。この作業自体はインストールが出来ていれば実は超かんたんです.
Continue reading
OpenRTM-aist Python インストール
このページではPython版のOpenRTM-aistのインストール方法について解説します.
Continue reading
OpenRTM-aist Java インストール
このページではJava版のOpenRTM-aistのインストール方法について解説します.
Continue reading
OpenRTM-aist C++ インストール
このページではOpenRTM-aistのヴァージョン1.1 RELEASE,C++バージョンについて解説します.
本ページでは入門者向け内容ですので,Windowsバージョン,C++版について解説します.
よくある質問
良くいわれる質問を集めてみました.僕の意見なので間違っているかもしれません.責任はもちろん,とりません(笑)
こんな人こそRTミドルウエア
RTミドルウエアを,研究室を運営する教員や,企業の技術者の視点から考えてみます.
Continue reading
OpenRTM-aistとは何か?
OpenRTM-aistとは,日本の産業技術研究所が主体となって開発しているロボット用の総合プラットフォーム規格「RTミドルウエア」に則った形で,産総研自身が開発しているソフトウェア・ライブラリ(およびツール群)のことです.