国際ロボット展に出られた方、あと、IROSにいらっしゃった方、ホストで走り回った関東圏の先生方、お疲れ様でした。
僕はというと、どちらにもあまり関連のない、いやあるといえばある、という仕事をしてました。
合間にぶらりと見学できたので感想を。
サービスロボットは相変わらず
各社、新しいことをしてます。相変わらず(笑)楽しい。
アールティの猫の手とか、ライフロボティクスのロボットとか(実物見れなかった)、面白いところに目をつけてると思います。
中でも西日本高速道路の展示があって、それは目を引きました。高速道路のトンネルなどを走行する車両から検査する技術の紹介があり、なぜロボット展、と思いましたが、そう思うと絡まずにはいられなかった。
検査ロボットとか見に来た人にアピールしたかったのか、まあ、そこのところはよくわからなかったが、とりあえず堅実にビジネスしてるな、という空気があった(ほぼ唯一)
IROSの展示ブースは微妙だった。あそこに出すのは失敗じゃないか、と思うポジションだし、ブースの色変えるとか、床敷くとか、なんかやっといて欲しかった。展示自体は他のものとは一線を画す展示でよかった。
産ロボは何か起こるのか?
エプソンやABBが双腕のロボットを出してて、どういうつもりなんだ?と聞いて回った。
ABB
ABBは以前から開発してるものらしいが、やっぱりイマイチピンとこない問答に終わった。


Q.何に使うの?
A.ご覧の通り、対面して組み立て部品を搬送します。
Q.それってこれじゃなきゃ出来ないの?
A.組み立てるのに二本のアームが必要な作業です。
Q.いや、ならアームを二セット買えばいいじゃん。
A.設置した際の位置関係などチューニングが、、、
Q.ならなんでカメラは別なの?
A.これからつけるかもしれないです。
Q.だいたい設置してからのチューニングなんて、全体から見れば大したコストじゃないじゃん。
A.フレキシブルにラインを、、、多品種少量、、、この辺から忘れた。
うーん。
エプソン
エプソンは聞いた人が若い人過ぎて、さらにイマイチだったが、プレゼンでは、視覚で認識して、力学センサ使って把持位置を当てどめして補正して組み立て。
当てどめかぁ、、、
写真は取れなかった.
エプソンではとにかく認識の言葉が踊ったけど、そんなに認識技術は進歩したのか?
オープンソースがFAに来るのか?
ネクステージはオープンになり、デンソーのブースでもROSで動くロボットが。我らが東京オープンソースロボティクス協会との合同ってことで出てました。
 デンソーのブースでは、やはり安全規格の話になり、あちらはIPC8という安全規格準拠のハードにROSを入れていて、気を使ってるのが良くわかります。I飼さんも熱く語ってもらって嬉しかった。
デンソーのブースでは、やはり安全規格の話になり、あちらはIPC8という安全規格準拠のハードにROSを入れていて、気を使ってるのが良くわかります。I飼さんも熱く語ってもらって嬉しかった。
やはり,オープンソースとFAは水と油のようなものだけど・・・とも言われましたが.
ネクステージは噂のメカ上司。写真とるの忘れたけど、面白い展示。信頼性がまだまだ低いけど、あれだけ視覚化するツールが無料で手に入る時代と感じさせる展示。これ使って、新しいことしようぜ!という気概が、僕には感じられますが、皆さんはどうでしょうか?
各社、画像認識やタクトタイム向上の開発を続けてるのはよくわかりましたが、方向性としては、フレキシブルでコンパクトなラインという道があるんだな、というのが、僕が回ったブースの印象。やることは部品やら,トレイやらの把持搬送だけだろうけど、ここではもちろん、ティーチングが鍵になります。
オンラインのティーチングはもちろん有効でしょうけど、搬送対象のフィードに工夫が欠かせないです。
オフラインはコーディングによってパラメータを変更しながらの搬送が可能ですし、皆さん開発してる認識技術とのマッチングがしやすいけど、現場とのすり合わせだったり、コーディング自体の手間が肝。ずーっと変わらないようにも見える。
そんな中、
東大発ベンチャーのMUJINは、MUJINスキャナという、デプスセンサによる三次元モデリングと、シミュレーションによる軌道最適化とロボット言語のコード自動生成を行うMUJINコントローラの組み合わせを提案してた。デンソーやカワサキ、三菱で使えるということで、お客さんも広がるんじゃないかな。
オフラインティーチングでは、Robomasterも注目してたんだが、と思ったらちゃんとブース出てた。こっちはパーツデータからバリ取りさせる軌道を自動生成したり出来る。
ティーチングという点ではファナックが、認識対象をトレイに置くことでメモリさせて、あとはマーカーなどでティーチングする技術の展示を行ってて、これは面白かった。たぶん、こういう道が現実的な気がする。オフラインティーチングとオンラインの合わせ技という部分でまだまだ掘り下げるところもあれば、新しい視点を加えられる点もあると思う。こういうところ、大学とかの学者にやって欲しい。
RTミドルウエアとか
今回はORiN協議会も展示だしてましたが,NEDOのブース内にRTミドルウエア関連の展示がありました.

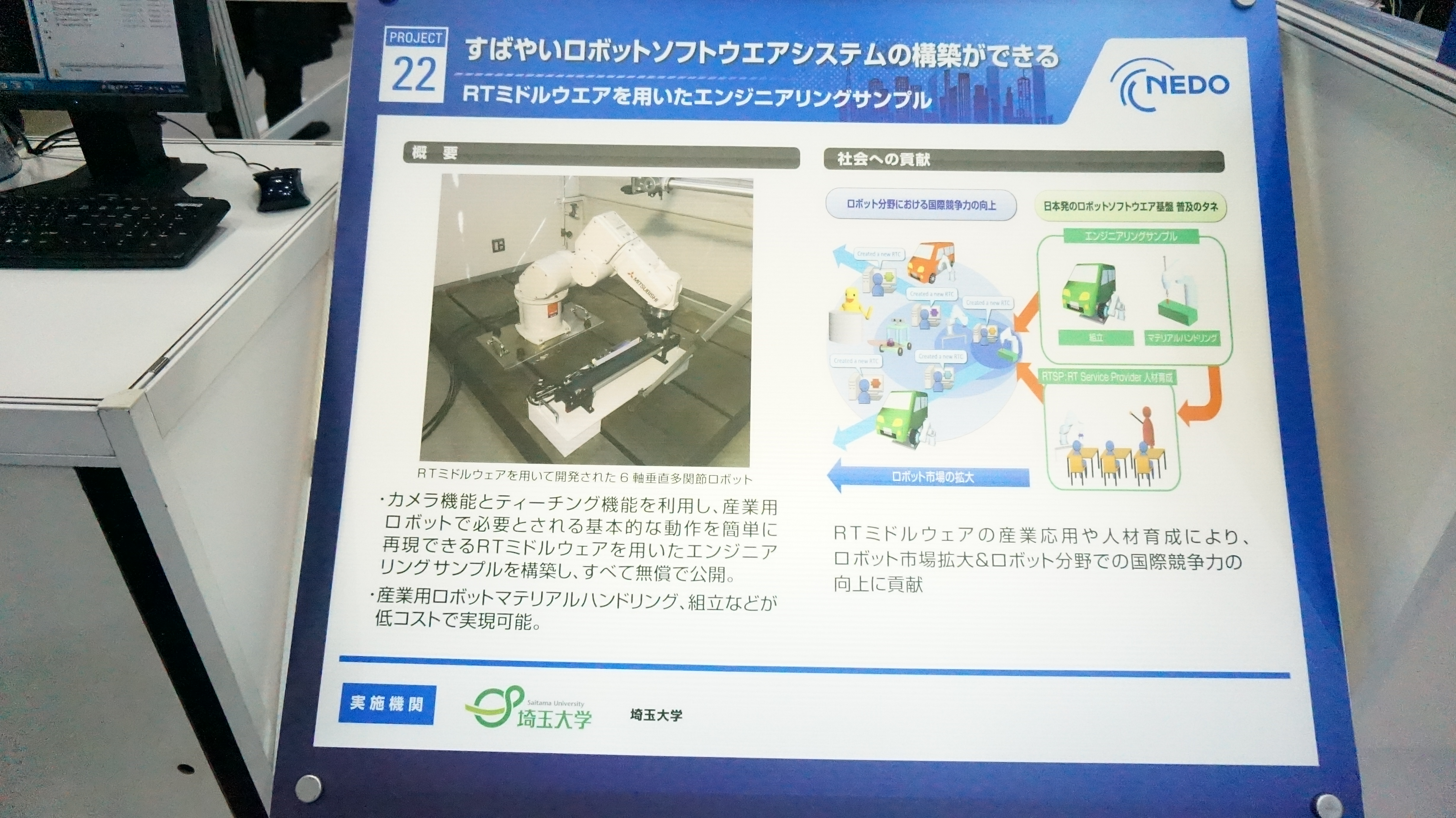
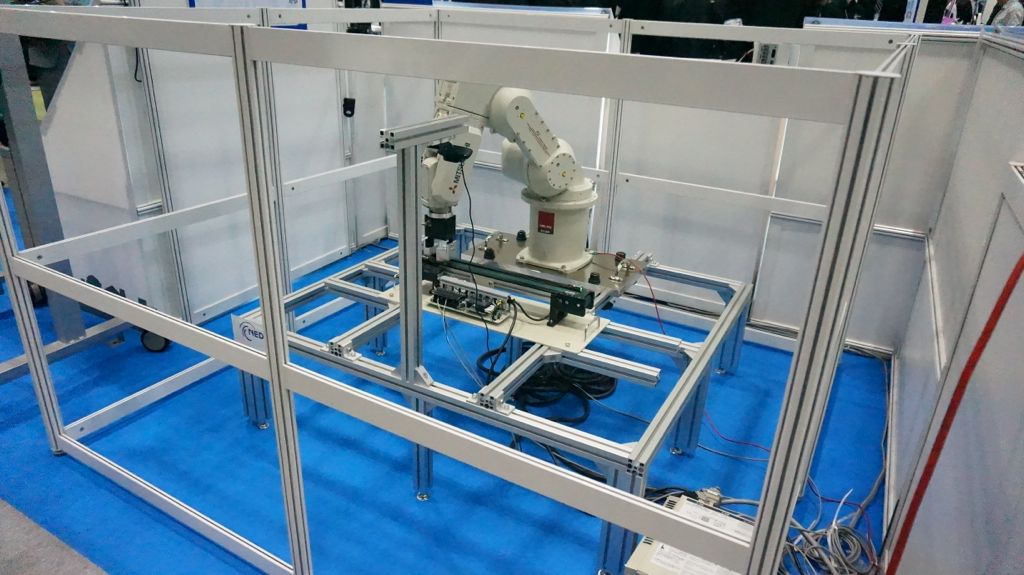 RTミドルウエアの基本的な内容の展示の他に,埼玉大学琴坂研究室で開発している,FA用機器をRTミドルウエアによって組み合わせるサンプルが展示されていました.このサンプルはソフトウエアやマニュアルをCD-ROMで配布してました.これは結構,反響があったみたい.使える場面が想像しやすい人も多かったはず.
RTミドルウエアの基本的な内容の展示の他に,埼玉大学琴坂研究室で開発している,FA用機器をRTミドルウエアによって組み合わせるサンプルが展示されていました.このサンプルはソフトウエアやマニュアルをCD-ROMで配布してました.これは結構,反響があったみたい.使える場面が想像しやすい人も多かったはず.
他にも,株式会社セックの機能安全ミドルウエアRTMSafetyの展示もありましたね.
バクスターあった
 Baxtorが置いてありましたね.
Baxtorが置いてありましたね.
個人的にはサポートが心配.
日本では良くあることですが,買うだけ買って,放置されるロボットにならなければ良いのですが・・・
最後に
今回は風邪を引いていたので,あんまり写真も取れなかったし,じっくり回る時間も無かったのですが,FA用ロボットの高度知能化,というか,違った視点の知能化という所が,面白そうに感じました.どう違うのか、という点は,そのうちにお話ししましょう.